
Lección 2
Ecuaciones cinemáticas
Descripción cinemática del movimiento
Para describir el completamente el movimiento de los cuerpos, se debe conocer su posición en cualquier instante de tiempo. Entonces, nos podemos hacer la siguiente pregunta: ¿En qué posición se encuentra el cuerpo en cualquier instante de tiempo? Si la aceleración varía en el tiempo, la posibilidad de analizar dicho movimiento con estas características se vuelve muy complejo. Un caso simple, es aquel que se realiza en una dirección con aceleración constante. Si la aceleración es constante, significa que la velocidad cambia de manera uniforme en todo el movimiento.
Para la descripción del movimiento con aceleración constante, requiere de las siguientes ecuaciones básicas:
`x = bar v t`
`bar v = (v + v_0)/2`
`bar v = bar (v_0) + bar a t`
`x = bar (x_0)t + 1/2 bar a t^2`
`v^2 = v_0^2 + 2ax`

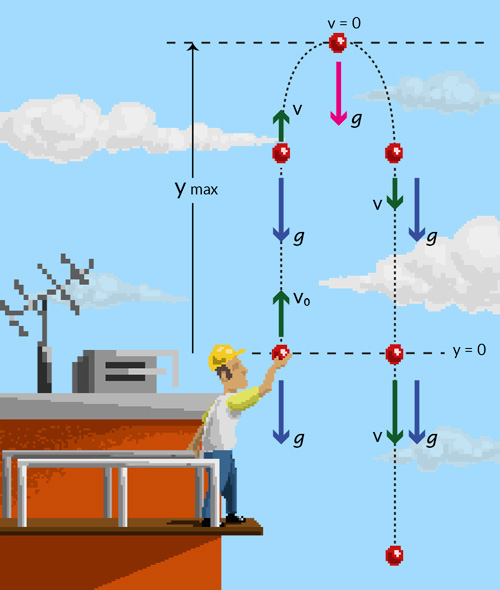
Caída libre
Uno de los casos más familiares de aceleración constante se debe a la gravedad cerca de la superficie de la Tierra. Cuando un objeto cae, su velocidad inicial es cero (en el instante en que es liberado), pero un tiempo después durante la caída, tiene una velocidad que no es cero. Ha habido un cambio en la velocidad y, por definición, una aceleración. La aceleración debida a la gravedad (g) tiene un valor aproximado (magnitud) de `g= 9,8 "m"/"s"^2`.
Los valores dados aquí para g son sólo aproximados pues la aceleración debida a la gravedad varía ligeramente en diferentes lugares como resultado de las diferencias en la elevación y la masa promedio regional de la Tierra.
Se dice que los objetos en movimiento solo bajo la influencia de la gravedad, están en caída libre. La aceleración debida a la gravedad g es la aceleración constante para todos los objetos en caída libre, sin considerar su masa ni su peso.
Para la descripción del movimiento de caída libre, se acostumbra utilizar y para representar la dirección vertical y tomar hacia arriba como positiva, y se requiere de las siguientes ecuaciones básicas:
`y = bar v t`
`bar v = (v + v_0)/2`
`bar v = bar (v_0) + bar g t`
`y = bar (y_0)t + 1/2 bar g t^2`
`v^2 = v_0^2 + 2gy`